 (4)
(4)
 (5)
(5)
where ZA is the number of teeth in the sun gear, ZC is the number of teeth in the ring gear, n is the number of planet gears and m is an arbitrary integer.
Using Equations 4 and 5 makes it possible to provide a meshing phase difference of 1/n pitch at the meshing position of each planet gear with the sun gear even if the planet gears are spaced equally. If the number of teeth is selected according to the conditions in Equations 4 and 5, the meshing of the sun gear and the planet gears and that of the planet gears and the ring gear will all have a different meshing phase. Accordingly, rotational variation induced by meshing in the direction of rotation, which is one factor causing vibration based on the meshing cycle, should theoretically be 0 because the varying components of the overall stiffness of the teeth pairs differ mutually in phase and are completely balanced (Ref. 2).
A rotational variation of theoretical 0 is thought to be the reason why vibration in the direction of rotation is markedly reduced when the planet gears and sun gear mesh. In a planetary gear set with a meshing phase difference in the direction of rotation, force changes induced by the planet gears in the radial direction relative to the sun gear are considerably smaller. However, if necessary, it is possible to design a meshing phase difference in both the rotational and radial directions.
Figure 2 shows the change in excitation forces in a planetary gear set that was given a meshing phase difference in this study. This diagram makes it easier to understand the effect of the meshing phase difference. It is assumed here that the meshing excitation force applied by each planet gear can be transformed to a simple sine wave having a cycle of one tooth pitch. It is also assumed that the amplitude and cycle between each of the planet gears are the same, which results in the excitation forces being completely cancelled out by the meshing phase difference, as is seen in this figure.
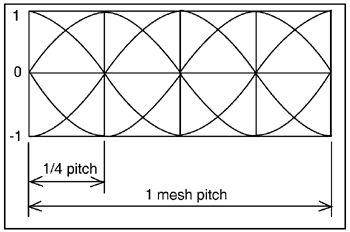
Figure 2--Elimination of exciting forces caused by four planet gears.
Using the equation proposed by Suzuki, et al. (Ref. 6), the rotational transmission errors of planetary gear sets with and without meshing phase differences were calculated, assuming that there were three or four planet gears. For both three and four planet gears, the calculated rotational transmission error was reduced to one-thirtieth of its original value by applying a meshing phase difference, assuming that each gear had the same level of accuracy. (A detailed explanation of the calculated results is omitted here.)
It is thought that the number of planet gears has substantially less influence on vibration and noise than the meshing phase difference design.
Experimental Apparatus and Procedure
Planetary gear set testing machine. Figure 3 shows an axial cross section of a prototype planetary gear set testing machine that was designed and built in this study for the purpose of measuring the noise and vibration of each planetary gear set separately in each speed range of automatic transmissions in use on production vehicles. The stationary and mating parts are provided with joints having an internal spline. This provision enables the mating parts to move to a position of equal meshing when the load torque is applied, so the load acts uniformly.
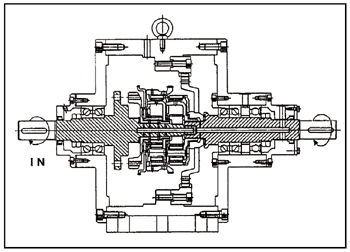
Figure 3--Axial section of a planetary gear set testing machine.
The machine is designed such that the stationary parts and planetary gear sets for an automatic transmission can be tested separately in each speed range. By changing the method of coupling the planetary gear set, the method of locking the primary shaft, the switching of gears between drive and driven states and other conditions, the machine can switch among four gear ratios just like an actual transmission used in a passenger car. Figure 4 shows a schematic diagram of a transmission built with two planetary gear sets, one without a meshing phase difference (denoted as gear set I) and one with (denoted as gear set II).
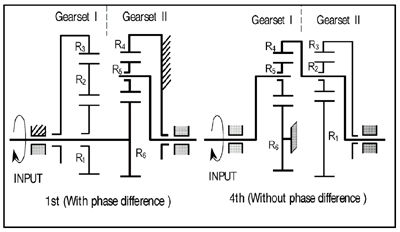
Figure 4--Schematic diagrams of planetary gear sets.
Experimental apparatus. The schematic diagram in Figure 5 shows the arrangement of the measuring devices for the power-absorbing type of gear load testing machine used in the experiments. Rotational speed and input and output shaft torque were measured under an applied load with an electronic speed meter and strain gauges, respectively.
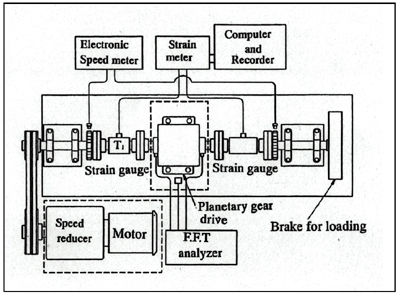
Figure 5--Gear set testing system.
As indicated by the dashed lines in the figure, the drive motor, continuously variable transmission and planetary gear set testing machine were enclosed in soundproof boxes, which reduced background noise by approximately 6 dB.
Test gears. The specifications of the gears of the planetary gear sets used in the experiments are given in Table 1. Planetary gear set I did not have a meshing phase difference, whereas planetary gear set II did. Two types of sun and planet gears were used. One type was shaved and hardened by carburization only; the other type was ground on a Maag gear grinder following hardening. The accuracy of the former type was JIS class 3-4, and the maximum height (Ry) of the tooth surface roughness profile was approximately 6 µm. The accuracy of the ground gears was JIS class 0-1, and the maximum height (Ry) of the tooth surface roughness profile was approximately 2 µm.
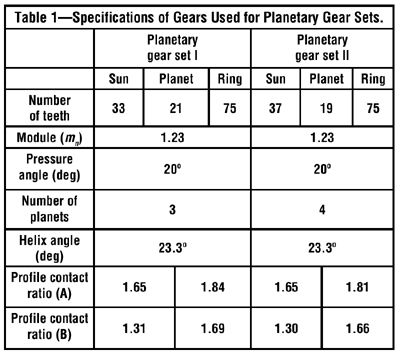
As indicated in Table 1, two types of planet gears and sun gears having different addendum circle radii were used to vary the transverse contact ratio. The test gear pairs came from the same manufacturing lot as mass-produced gears, and an effort was made to select ones having tooth face geometries that were as uniform as possible. Care was taken to achieve the same experimental conditions by measuring the accuracy of the tooth shape and tooth trace of all the test gears and the planet gear shaft hole position accuracy and layout accuracy of the carriers for
assembling the planet gears.
Experimental procedure. The abovementioned two types of planet gears and sun gears having different tooth shape meshing ratios and finished with different processing methods were installed in the planetary gear set testing machine, and tests were run with the lubrication oil temperature set at 32° ±2° C. The flow rate of the lubrication oil was set at 1.5 L/min, and the oil was circulated by means of an oil pump. The lubrication oil used was a commercial automatic transmission fluid. The vibration acceleration and noise levels of the planetary gear sets were measured in an input torque range of 0-80 Nm and an input shaft speed range of 500-2,400 rpm, with the rotational speed varied in increments of 100 rpm. Two acceleration pickups were attached near the bearings that supported the input and output shafts. A stationary noise meter for measuring the noise level (characteristic A) was positioned 60 mm from the top of the planetary gear set testing machine housed in a soundproof box.
Experimental Results and Discussion
Effect of meshing phase difference on vibration and noise. Figure 6 and Figure 7 show the effect of the meshing phase difference on the measured vibration and noise levels of the planetary gear sets when the gear tangential load was 400 N. Planetary gear pairs with full-depth teeth (profile contact ratio A in Table 1) were used as the test gears. The closed triangles and open squares indicate the change in the noise and vibration levels of planetary gear set I without a meshing phase difference and planetary gear set II with a meshing phase difference, respectively. As seen in the figures, the vibration and noise levels of the planetary gear set with the meshing phase difference were 3-5 dB and 5-7 dB lower, respectively, than the levels measured for the planetary gear set without the meshing phase difference.
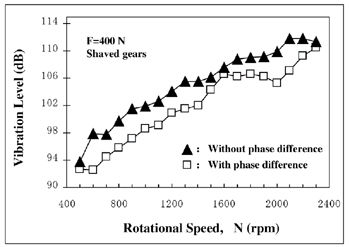
Figure 6--Effect of meshing phase difference on vibration.
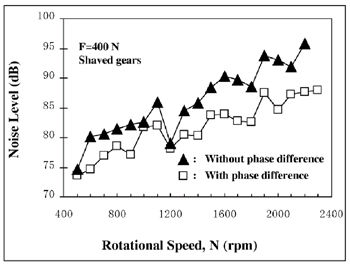
Figure 7--Effect of meshing phase difference on noise.
Figure 8 and Figure 9 show the measured vibration and noise levels when planet and sun gears that have been ground on a Maag gear grinder were used in the test planetary gear sets. At nearly all of the measured speeds, the planetary gear set with the meshing phase difference shows vibration and noise levels that were approximately 3-4 dB and 6-9 dB lower, respectively, than those of the planetary gear set without a meshing phase difference. The effect of the meshing phase difference is presumed to be even more pronounced in these results because the influence of gear accuracy was relatively reduced by using ground gears.
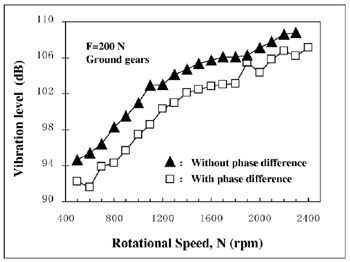
Figure 8--Effect of meshing phase difference on vibration.
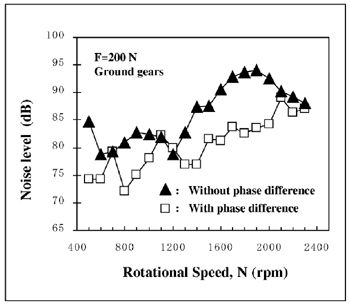
Figure 9--Effect of meshing phase difference on noise.
The measured vibration level is shown in Figure 10 as a function of the load torque. Over the entire torque range from low to high, the planetary gear set without a meshing phase difference shows an increase in vibration of around 3-4 dB with an increase in load torque. However, the vibration level of the planetary gear set with the meshing phase difference was insensitive to load torque changes.
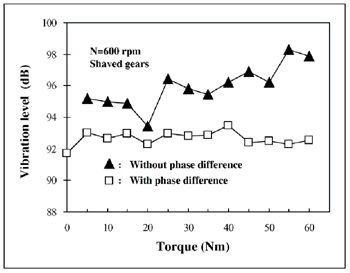
Figure 10--Effect of meshing phase difference on vibration.
Influence of tooth profile contact ratio and accuracy on vibration and noise. Figure 11 shows the measured noise level when planet gear pairs with large and small transverse contact ratios (profile contact ratios A and B, respectively, in Table 1) were used in planetary gear sets incorporating a meshing phase difference. The noise and vibration levels for the planetary gear sets with different contact ratios (i.e., full-depth teeth vs. normal-depth teeth) did not show any clear differences.
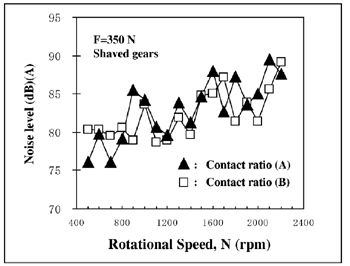
Figure 11--Effect of meshing phase difference on noise.
When contact ratios differ, the cyclic change in the spring stiffness of the meshing teeth varies, so the change in meshing excitation forces that occurs due to the change in the spring stiffness of the gear pairs is cancelled out in a planetary gear set with a meshing phase difference. Therefore, the effect on the gear noise level is presumably reduced even if the contact ratio is increased by using gears with full-depth teeth, which would account for the lack of a clear difference in Figure 11.
The effect of test gear accuracy on the vibration level of planetary gear sets with a meshing phase difference is shown in Figure 12. The measured vibration levels compared here are for sun and planet gears that were shaved only and hardened by carburization and those that were ground after being hardened by carburization.
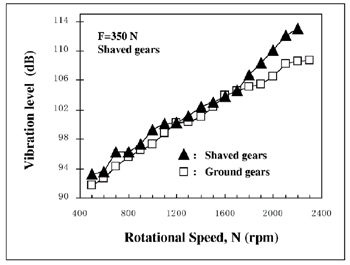
Figure 12--Effect of grinding on vibration.
The vibration level of the planetary gear set built with the ground gears was 1-4 dB lower. This lower level is attributed to the improved machining accuracy of the gears and the reduced roughness of the tooth face. The reduced vibration was especially pronounced at rotational speeds above 1,800 rpm.
Effect of the rotational order on vibration. The vibration components were measured using a fast Fourier transform (FFT) analyzer. Figure 13 and Figure 14 show the effect of the meshing phase difference on the first- and second-order meshing components of the measured vibrations.
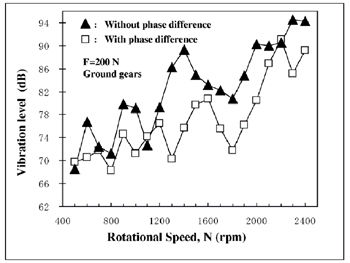
Figure 13--Effect of first-order meshing frequency of meshing phase difference on vibration.
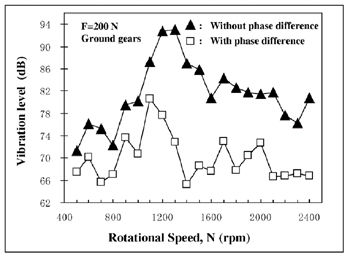
Figure 14--Effect of second-order meshing frequency of meshing phase difference on vibration.
Among the variable components of the dynamic planetary gear set load, the first-order component generally has the largest amplitude (Ref. 4), but passenger compartment quietness (an NVH characteristic) is thought to be mainly influenced by the first- and second-order meshing vibration components of the planet gear noise of an automatic transmission.
The experimental results in Figures 13 and 14 indicate that the first- and second-order vibration levels of the planetary gear set with a meshing phase difference were rather low. In other words, it has been shown experimentally here that a meshing phase difference design can reduce the first- and second-order meshing vibration components.
Vibration acceleration and noise frequency analysis. Figure 15 and Figure 16 show the measured noise levels and frequency components of the vibration acceleration of planetary gear sets with and without a meshing phase difference when sun and planet gears having ground tooth faces were used. The noise level and vibration acceleration level of the planetary gear set without the meshing phase difference were approximately 3-9 dB higher.
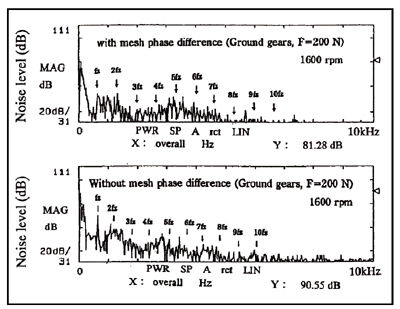
Figure 15--Noise spectrum of planetary gear sets.
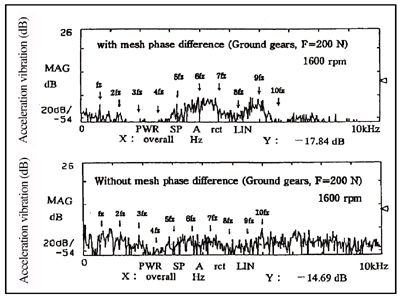
Figure 16--Acceleration spectrum of planetary gear sets.
The first- to third-order components of the planet gear meshing frequency, fz, also show higher peaks than those seen for the planetary gear set with the meshing phase difference, which indicates that frequency components were present in the high-frequency range as well.
In the case of the planetary gear set with the meshing phase difference, the meshing phases of the teeth of the planet gears when they meshed with the sun gear had a differing composition. Consequently, the meshing phases of the torsional vibrations induced by changes in the spring stiffness of the teeth accompanying changes in the meshing states of tooth pairs differed in their composition. Therefore, it is assumed that the resulting interference had the effect of mitigating the noise and vibration levels of the planetary gear set with the meshing phase difference.
Measured vibration results for planet gears in vehicle tests. Figure 17 shows the first-order meshing frequency of the vibration acceleration levels measured for planet gears with and without a meshing phase difference in tests conducted with a 2.0L front-wheel-drive car fitted with a four-speed automatic transmission. Schematic diagrams of the automatic transmission used in the tests are given in Figure 4.
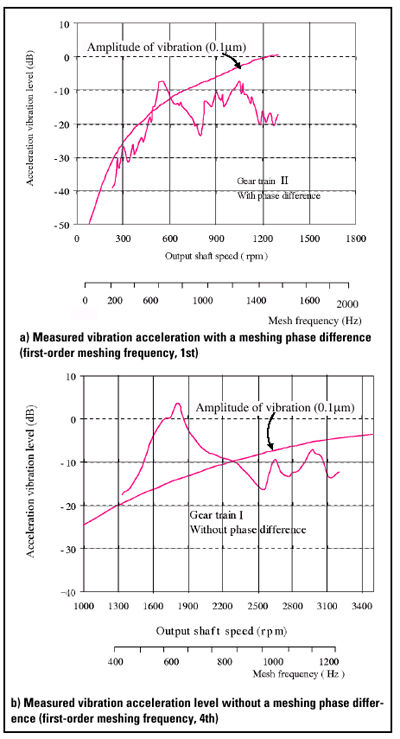
Figure 17--Measured vibration acceleration levels in vehicle tests.
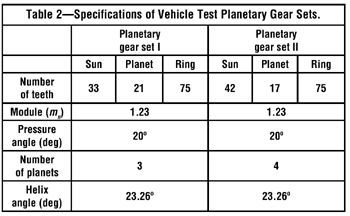
This automatic transmission consisted of two planetary gear sets. The specifications of the planetary gear sets are given in Table 2. Measurements were made under a condition of gradual acceleration in first and fourth gears. As seen in the figure, the vibration acceleration level of planetary gear set II with a meshing phase difference was approximately 3-12 dB lower than that of planetary gear set I without a meshing phase difference. Better results were thus obtained by applying a meshing phase difference.
Conclusions
An original planetary gear set testing machine was designed and built so planetary gear sets in four-speed automatic transmissions fitted on production vehicles can be tested separately in each speed range. Planetary gear sets were tested under varying rotational speeds and tooth face loads to examine how vibration and noise were affected by different methods of finishing the test gears, different contact ratios and other factors. The results obtained are summarized below:
1.) It was shown that applying a meshing phase difference to planet gears reduced planetary gear set vibration and noise.
2.) When a phase difference was applied to the meshing of gear teeth, it was seen that the noise and vibration levels of the planetary gear set were less susceptible to the influence of the tooth profile contact ratio.
3.) It was also shown that the noise and vibration levels of a planetary gear set with a meshing phase difference can be further reduced by improving gear accuracy and tooth face roughness.
This paper was presented at the ASME/AGMA 2003 International Power Transmission and Gearing Conference, held Sept. 3-5, 2003, in Chicago, IL, and was published in Proceedings of the 2003 ASME Design Engineering Technical Conferences &Computers and Information in Engineering Conference. It’s republished here with permission from ASME.
References
1. Ono, S. "Measures to Reduce Automotive Noise and Their Results" (in Japanese), Journal of Society of
Automotive Engineers of Japan, Vol. 54, No. 3, March 2000, p. 9.
2. Katoh, T., N. Maruyama and K. Morikawa. "Loaded Transmission Error in a Planetary Gear System" (in Japanese), Proceedings of the International Conference on Motion and Power Transmission, MPT ’91, 1991, p. 530.
3. Morikawa, K., and N. Maruyama. "A Design Technology of Automatic Transmission Gears" (in Japanese), Nissan Technical Review, No. 31, 1992-6 (June 1992), p. 85.
4. Palme, W.E., and R.R. Fuehrer. "Noise Control in Planetary Transmissions," SAE Paper No. 770561, Proceedings of the Earthmoving Industry Conference, 1977.
5. Senba, M. "Gears" (in Japanese), Nikkan Kogyo Shimbun, Vol. 10, 1967, p. 3637.
6. Suzuki, Y., S. Kiyono, K. Umezawa, et al. "Experimental Study of Transmission Gear Noise" (in Japanese), Transactions of the Society of Automotive Engineers of Japan, No. 40, January 1989, p. 90.
Dr. Yong Chen is in charge of research and development of gear mechanics for car automatic transmissions in the engineering development center of JATCO Ltd., located in Fuji-shi, Japan. His work mainly involves research on the noise, vibration and power transmission efficiency of the planetary gear mechanism of automatic transmissions and research into contact fatigue strength of carburized gears that have undergone tooth surface modification.
Dr.-Eng. Akira Ishibashi is an emeritus professor at Saga University,located in Saga, Japan. He’s designed and made a superprecise gear grinding machine with a CBN grinding wheel, capable of mirrorlike finishing. He’s also designed and made a large capacity testing machine capable of applying loads on teeth during rotation of test gears. He’s a member of the American Society of Mechanical Engineers and of the Japan Society of Mechanical Engineers.






 (1)
(1) (2)
(2) (3)
(3)